08/12/17 : Etat des lieux...
Avant de commencer je tenais à faire un petit bilan des différents éléments déjà en ma possession, en plus bien évidemment de la coque de Scaleship.
Panier de course des éléments nécessaires déjà acheté :
Arbres d'hélice :
Tige Inox 450mm de long x2 Diam 5mm : 5€
Potence et cloison WTC :
Bague bronze : BNZ5-10-10 x4
Roulement : MF105-ZZ x2
Joint Spi : CD-5X10X2-NBR x4
(Soit 25.22€)
Passe-coque 3 mm (Soit environ 7.9€)
Ballast Dur :
Matière PVC [10mm, 5mm, 3mm, 1mm) : 130€
Piston Engel :
EA 500ml x2, Tube 1m, Embout cloison : 359€
Protection :
Apprêt Motip Rouge : 11.90€
Colle :
Pour PVC : 7.90€
Et je ne compte pas le coût horaire en conception et réalisation parce que si on se lance là dedans... on a pas fini ! 

L'avancement des éléments de la coque étanche avance bien, une couche d'apprêt a été posée et je suis très content du résultat. J'en ai profité pour finaliser les attaches entre le bâti moteur et le support des servos mais seul deux des quatre tiges ont été posées.
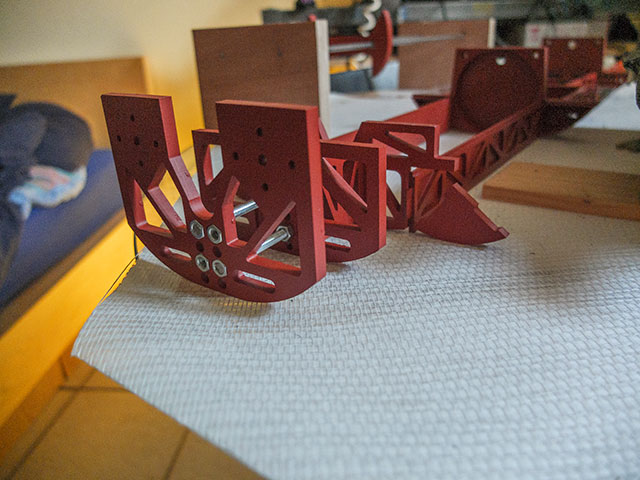
La couleur rouge n'était pas à la base prévue mais il me restait une bombe d'apprêt neuve dans mon stock et c'est pour ça que je l'ai utilisée. Finalement, je trouve que c'est pas mal et je pense que je vais peut être simplement passer une couche de vernis et non pas la couleur crème que j'avais initialement prévu.
Je prépare aussi la version 2.1 de la fosse, je ne suis pas totalement satisfait de la version 2.0.0 et comme je dois faire aussi les pièces pour le K-442, j'en profite pour faire les usinages en double des fichiers validés !
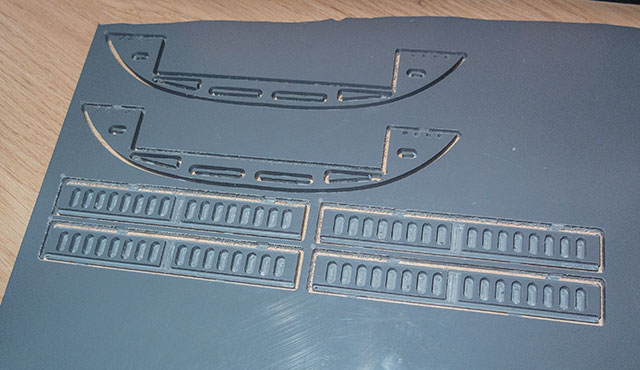
Sur la photo précédente, on a le couple intermédiaire de la fosse et les murs entretoise.
Avec la cloison A que je dois terminer de dessiner ce weekend, et les pièces modifiés de la fosse j'aurai terminé le ballast. Et les plafonds ? justement je ne les fais pas tant que je n'ai pas les infos concernant le circuit pneumatique ET que l'ensemble des autres éléments du ballast ne sont pas déjà disposés dans la coque !