Moteur, hélice et réduction !
I) Introduction et rappels de bases
Un sous-marin a besoin d'un système propulsif pour évoluer en surface (comme les navires) ou en plongée. C'est une évidence me direz-vous et je plussoie votre remarque. Mais allons un peu plus loin dans la réflexion.
Schéma n°1 : Configuration mono-moteur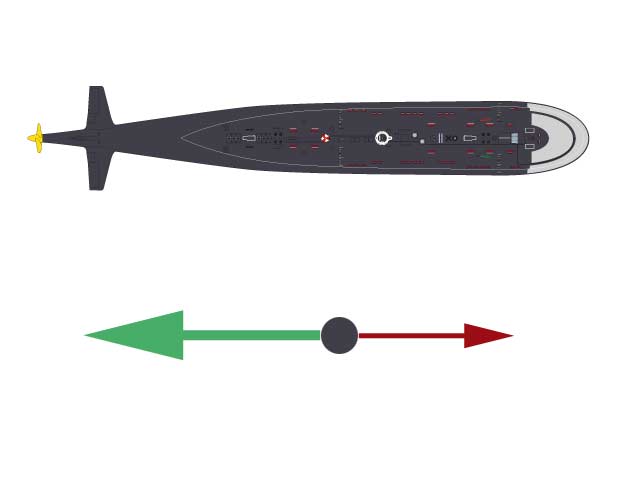
Finalement, un sous-marin peux se résumer en simplifiant comme ceci. La flèche verte représente le moment de la force appliqué au point. il en résulte un mouvement du point signifié par la flèche rouge : le sous-marin avance. Je vous fait grâce des différentes moment des forces du à la résistance et autre joyeuseté dont l'hydro-dynamisme apporte des solutions ce n'est pas le propos de cette introduction.
Schéma n°2 : Configuration bi-moteurs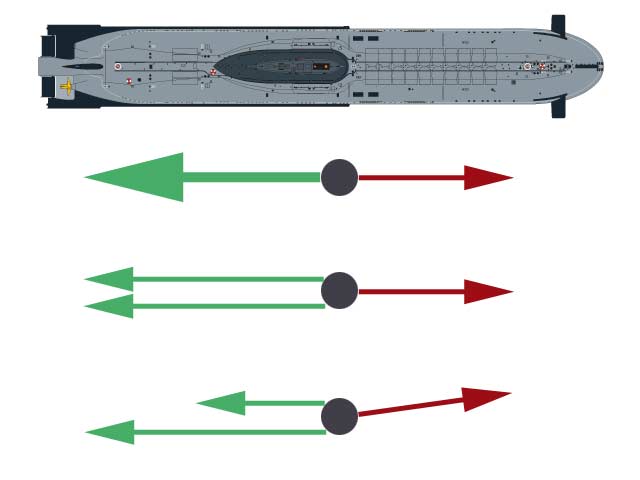
Avec une double motorisation c'est exactement la même chose tant que le régime sur les deux lignes d'arbre est rigoureusement identique. Le moment de la force résultante est égale à la somme des moments des forces individuelle fournit par les lignes d'arbres/hélices. Si pour une raison quelconque l'un des moments faiblit, l'angle de la résultante (flèche rouge) subit un fléchissement de sa trajectoire qui compense la différence entre les deux moments de force. (là aussi je vous épargne le calcul du torseur sinon vous n'allez pas finir cette article >_<).
Bien que j'ai simplifié honteusement la démonstration, on comprend aisément pourquoi il est tentant de doter les sous-marins de grande taille d'une double propulsion pour ainsi faciliter l'évolution. Nous verrons plus tard quel impact cela va avoir sur le calcul de la motorisation et de la réduction qui en découle !
II) L'Hélice
A) Un peu de théorie simplifiée
Une hélice, ce n'est ni plus ni moins qu'une vis. Une fois que l'on a bien cela en tête, on peux décomposer notre hélice en deux parties distinctes, le moyeu et les pales. Tout ce que l'on peux trouver d'autres sur une hélice n'a aucune fonction propulsive (anode sacrificielle, perturbateur de flux, etc...).
Le moyeux étant le prolongement de l'arbre, son diamètre va influer sur le pas de l'hélice.
Le Pas se calculant comme ceci : Pas = Tan ά x π x D
D étant le diamètre du moyeux.
L'angle ά se détermine par la diagonale du rectangle dont la longueur = π x D et la largeur = Pas
Exemple :
Tan (45) x 3.14 x 10mm = 31.4 de Pas
Tan (25) x 3.14 x 10mm = 14.6 de Pas
On remarque que le nombre de pale n'influence pas le Pas de l'hélice. La mesure de l'angle de la pale à son extrémité, le calcul de la tangente de cet angle puis la multiplication de ce résultat obtenu par la circonférence de l'hélice.
Alors à quoi ça sert les pales ?
Les pales servent grâce à la rotation du moyeu à fournir une surface d'appui. Cette surface va provoquer une impulsion qui se traduit par un déplacement. Contrairement au idées reçu augmenter le nombre de pales ne va pas augmenter l'impulsion
- Les hélices à deux pales fixes ou en bec de canard sont utilisées sur des petits voiliers afin de limiter la traînée lorsque le moteur est à l'arrêt. Le coefficient de remplissage de ces hélices est volontairement réduit à son minimum mais doit supporter l'effort.
- Les hélices à trois pales sont les plus courantes sur les unités moyennes, elles ont un bon rendement en statique (force) et en dynamique (puissance). C'est un bon compromis force/puissance. On les utilise couramment sur les voiliers et les bateaux à moteur. Les voiliers sont parfois équipés d'hélices à trois pales orientables qui permettent de modifier le pas, elles se mettent en drapeau lorsque le moteur est à l'arrêt afin de réduire la traînée.
- Les hélices à quatre pales ont à peu près les mêmes caractéristiques que les hélices à trois pales à coefficient de remplissage égal. Elles ont l'avantage d'être mieux équilibrées et sont moins bruyantes, l'effet de résonance de l'hélice est diminué.
- Les hélices à cinq pales sont principalement utilisées sur les gros navires et sous-marins.
- Les hélices de surface sont utilisées par les vedettes rapides. L'hélice peut tourner très rapidement à la surface de l'eau, car l'effet de cavitation est réduit.
- Les hélices sabre sont principalement utilisées par les navires et sous-marins travaillant par petits fonds, afin d'éviter que l'hélice ne se prenne dans la végétation. la durée de vie du sillage est grandement réduit avec cette configuration
B) Du réel à la maquette...
Dans le cas d'une reproduction scale d'un modèle réel, on ne connais généralement que le diamètre du moyeu et le nombre de pales. Connaitre le Pas du modèle réel est déjà beaucoup plus difficile. Faire marcher le pifomètre dans le cas d'une fabrication industriel peux convenir mais lorsqu'il s'agit de passer une trentaine d'heure à la fabrication de son hélice celà deviens beaucoup plus aléatoire.
Divers fabricant fournissent des hélices génériques qui n'ont pas forcément la bonne forme mais qui de loin ressemble à...
L'objet de cette article n'étant pas la fabrication des hélices 100% from scratch, je laisse à ceux qui se sont lancés là dedans pour vous l'expliquer 
III) Moteur et réduction
La grande question que l'on peux se poser quand on commence la conception d'un modèle, se pose lorsqu'on arrive à la motorisation.
Quel moteur dois-je mettre dans mon modèle ?
Quel réduction ?
Tout d'abord posons les éléments à notre disposition :
1- La vitesse Max du réel
2- l'échelle du modèle
3- Le diamètre de l'hélice du modèle
Bon maintenant passons à un exemple pratique :
Un Alfa (projet 705 Lira) :
1- 41 nds
2- 1/100°
3- hélice de 40mm
Prennons la racine carré de l'echelle, ça nous donne "10".
41/10 = 4.1 nds (soit 7.59 km/h)
Nous avons une hélice de 40mm de diamètre. Disons que le pas de l'hélice est de 1 fois le diamètre de celle-ci (pas standard chez Raboesh). Considérons 40% de glissement pour 7,59km/h
7.59*1.000.000/41*0.6*60 = 5142 Tr/min-1
41 = Le pas
0.60 = le glissement
60 = multiplicateur seconde => minute
J'ai maintenant la vitesse de rotation du moteur. Maintenant les choses deviennent intéressante. Si je veux réduire la rotation du moteur il faut que j'augmente le Pas de l'hélice.
Les hélices Raboesh par exemple sont conçue pour une rotation maximum de 2500 Tr/min-1
Dans ce cas là, si je veux descendre à 2500 tours je dois quasiment doubler le pas de l'hélice et donc voir un pas de 82 pour une hélice de 40 mm !
On comprend bien alors l'impact que peux avoir une hélice sur la rotation du moteur et donc sont éventuel réduction.
Augmenter ainsi le pas n'est pas raisonnable si je veux maintenir ma vitesse de propulsion. Il va falloir que je trouve une hélice capable de survivre à ce régime sans éparpiller ses pales dans le bassin ou pire au visages des spectateurs !
Prenons le cas d'un moteur du type speed 500E :
Tension nominale 12 V
Plage de tension d'alimentation 6 ... 12 V
Régime de rotation à vide 12000 min-1
Consommation à vide 0,4 A
Consommation au rendement maximum 2 A
Consommation au blocage 10 A
Rendement max., sans réducteur 67 %
Longueur du carter, sans l'arbre 50 mm
Diamètre 35,8 mm
Longueur libre de l'arbre 8,5 mm
Diamètre de l'arbre 3,17 mm
Poids 158 g
Première chose intéressante, son rendement maximum est à 67% soit 8040 Tr/min-1 à vide et sa consommation de 2A !
Autan dire tout de suite, ce moteur doit être réducté pour obtenir son plein potentiel. Dans notre exemple nous obtenions une révolution de 5142 Tr/min-1 pour notre Alfa soit techniquement une réduction de 2.33/1.
Cependant il est déconseillé de s'approcher de la valeur théorique au risque de stresser inutilement l'hélice on optera pour une réduction plus "standard" de 2.5/1 ce qui fera une révolution sur l'arbre de 4800 Tr/min -1 soit une vitesse théorique de 7.1 Km/h. Je perd donc 0.49 Km/h théorique ce qui est négligeable.
La consommation théorique du moteur se situe aux environs 1.2A en régime max.
IV) Conclusion
Souvent négligé par les modélistes, la relation entre l'hélice, le réducteur et le moteur peuvent causer soit une incohérence de vitesse soit plus grave un risque de surcharge, de mauvais rendement voir de casse.
Qui n'a pas remarqué autour des bassins des modèles jouant les hors-bords ou pire qui se traînaient lamentablement ?
V) Cas spécial : La bi-motorisation
Comme on a pu le voir dans l'introduction, il existe plusieurs intérêts à la propulsion multiple. En effet, le première intérêt de cette configuration c'est d'appliquer de façon symétrique à l'axe de la coque une poussée ce qui va pouvoir garantir une meilleur tenue du cap et une aide à la giration. Un autre avantage indéniable c'est l'augmentation du rendement de l'ensemble de l'appareil propulsif. Je vous fait grâce des calcules laborieux mais on peut résumer cela de la façon suivante :
Pour obtenir une vitesse donnée, j'ai besoins d'une surface d'appui et d'un moteur pouvant délivrer une charge en tr/min-1. Théoriquement , on peux considérer qu'en fractionnant la surface d'appui et pour garder la même vitesse on va pouvoir diminuer le nombre de tr/min de la propulsion; ce qui apporte un autre avantage : la réduction du diamètre des deux hélices (pour garder une surface d'appui identique). La résultante des deux hélices est égale à celle que l'on pourrait trouver dans le cas d'une seul hélice.
Bien évidemment, c'est une raisonnement théorique volontairement simplificateur (donc incomplet si on l'applique à la réalité 1/1).
Il ne faut pas oublier que le Pas va avoir une influence sur le régime moteur. En réduisant le diamètre de l'hélice, je modifie la variable du Pas dans notre calcul.
Pour une configuration à deux hélices on peux théoriquement dire :
Nous voudrions mettre deux hélices sur une coque Alfa (sic !) en gardant les valeurs théorique de celui-ci :
La formule suivante nous donne la vitesse
Vt= ((ω x Pas x 60)/1000000) x Θ
ω = vitesse de révolution en tr/min-1
Θ = le glissement
Vt = vitesse résultante
Nous avions dans l'exemple de l'Alfa :
((5142x41x60)/1000000)x0.6 = 7,589592 soit en arrondis 7.59 km/h
Pour simplifier on va considérer que :
Vt = V1 + V2
V1 = vitesse de l'hélice n°1
V2 = vitesse de l'hélice n°1
Donc V1 = V2 = 7.59/2 = 3,795 Km/h
Il ne nous reste plus qu'à trouver le régime moteur à appliquer à deux hélices de 20 mm de diamètre et à leur Pas.
J'ai trouvé une hélice de 20 mm de diamètre et ayant un pas de 25,40.
Donc : 3.795*1000000/25.40*0.6*60 = 4150.26 Tr/min-1
J'obtiens pour mon speed 500 une réduction de 2.40 : 1
La consommation théorique du moteur se situe aux environs 1A en régime max.
Nos deux moteurs consommeront 2A en régime max.
Le cas particulier peux se trouver sur des propulsions à 3 moteurs avec un moteur principal mais dans ce cas c'est aussi très simple :
Vt = 2 x Vp
donc
Vt = Vp + (Vp/X)
Vt = vitesse total
Vp = vitesse délivrée par l'hélice principale
X = nombre de moteurs auxiliaire
Conclusion :
Normalement, pour faire un calcul on doit s'appuyer sur la formule P=FV ce qui nous donne la puissance de propulsion et donc la vitesse par le dimensionnement des moteurs. Dans le cas d'une reproduction ce qui nous importe c'est d'obtenir une vitesse réaliste par rapport à l'échelle du modèle. Nous adaptons en conséquence la motorisation non pas sur des considérations poids/puissance mais sur le "réalisme".
On remarque aussi que le choix du speed 500 n'est pas idéal. Choisir un moteur avec un rendement supérieur permettrait de baisser la consommation et donc d'augmenter l'autonomie.
.jpg)
.jpg)
.jpg)
.jpg)